
Section 4:
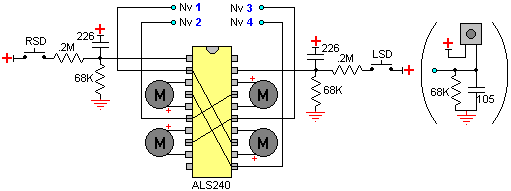
Section 4 is the driver for the 4 primary motors. It uses a 74ALS240, but I'm going to use 2 (or more) stacked 74AC240.
Circuit:
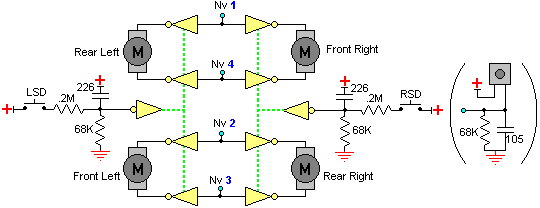
The circuit works by receiving pulses directly from the MicroCore. Each pulse moves forward one motor and backward a different one. The walking gait has to be carefully selected. Motors controled by the same Nvs are supposed to be diagonal . It also has 2 sensors:
Sensors:
| LSD | Left Side Disable: Disables the buffers for the left side motors. |
| RSD | Right Side Disable: Same as above but for the right side. |
|
An alternative for the touch sensors is shown between the ( ). THIS is what controls the phototrophic bahavior. The strange sensor is in fact some kind of photodiode (So simple, so simple...). One is used for each side. I think both sensors (touch and light) could be connected in parallel to the same input of the 74AC240. I'll have to experiment. |
|