
Section 3:
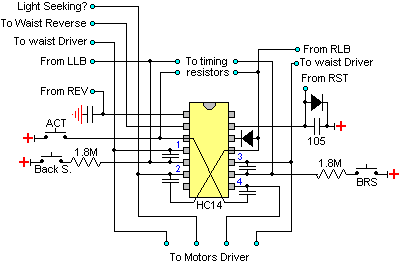
Section 3 is the MicroCore. It works with only one pulse in a loop of 4 Nvs. This is where the brains of the bot control the body. The Microcore can be alterated by various stimuli creating different behaviors. New: The Light Seeking? connection is actually used to activate the front LEDs.
Circuit:
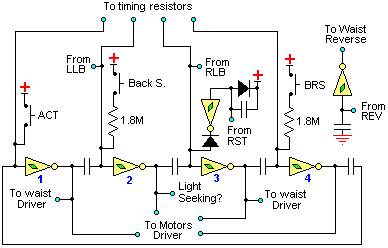
This is the Microcore circuit. On the top are all the sensors that stimulate the MicroCore inputs. On the left is the Waist reversing system. The bottom of the circuit includes all the outputs that control the waist driver, motors driver, and a connection to the LEDs.
Sensor Names:
| ACT | Activate: This is used for manually injecting of pulses to the MicroCore. |
| Back S. | Back Left Switch: Alters the timing of #2 Nv. |
| BRS | Back Right Switch: Same as before, but for #4 Nv. |
| There is also a connection on #3 Nv. This is the PNC that activates when someone touches the RST contact. | |