
Section 2:
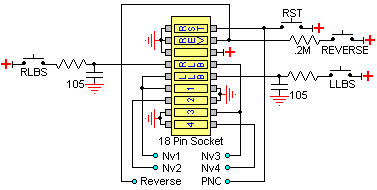
Section two consists of an 18 pin IC Socket to change resistor values (so diffenrent behaviors can be seen).
From top to bottom, resistor/sensor ''names'' are these:
| RST | Reset: It's used when the microcore is locked (saturated). It activates a PNC |
| REV | Reverse: Used to reverse the waist motor, so the whole robot backups. |
| ---- | The way the circuit is wired, if you place a resistor in this space, you will make a short. |
| RLB | Right Leg Backup?: I can only see it's used to lenghten Nv 3 |
| LLB | Left Leg Backup?: Same as RLB but for Nv1 |
| 1 | This is time resistor for Nv 1 |
| 2 | This is time resistor for Nv 2 |
| 3 | This is time resistor for Nv 3 |
| 4 | This is time resistor for Nv 4 |